

株式会社YDKテクノロジーズ(本社:東京都渋谷区、代表取締役社長:日比野隆也、以下、当社)は、川崎汽船株式会社(以下、「川崎汽船」)、日本無線株式会社(以下、「日本無線」) および川崎近海汽船株式会社(以下、「川崎近海汽船」)と共に開発を進めている統合操船者支援システム(Advanced Maneuvering Assistant System)において、一般財団法人日本海事協会(以下、「ClassNK」)から基本設計承認(AiP:Approval in Principle)(注1)を取得しました。
当社では、無人運航船の社会実装を目指した船上システム開発を、公益財団法人日本財団が推進する無人運航船プロジェクトMEGURI2040(以下、「MEGURI2040」)の「無人運航船の社会実装に向けた技術開発助成プログラム」(注2)において進めており、自動運航システムのコア技術となる統合操船者支援システム(Advanced Maneuvering Assistant System)がClassNKから基本設計承認を取得したものです。
取り組み背景
当社は、2021年から川崎汽船及び日本無線と共に、操船者の的確な操船判断支援を目的とした統合操船者支援システムの共同研究開発を進め、現在は共同研究開発で生み出した技術を活用してMEGURI2040に取り組んでいます。また、2022年には、川崎近海汽船が運航する既存RORO貨物船「第二ほくれん丸」を対象としたシステム設計、システムの使用条件やバックアップ体制などの安全性の検証においてはClassNKとの共同で進めてまいりました。
システム概要
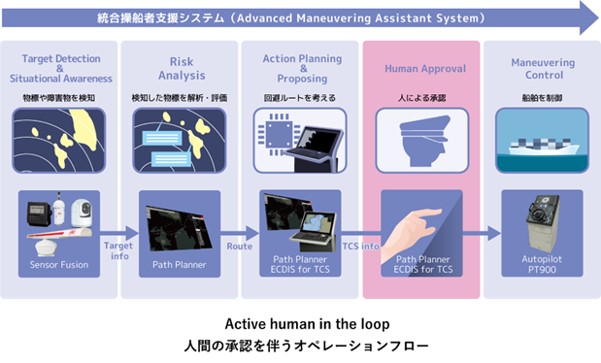
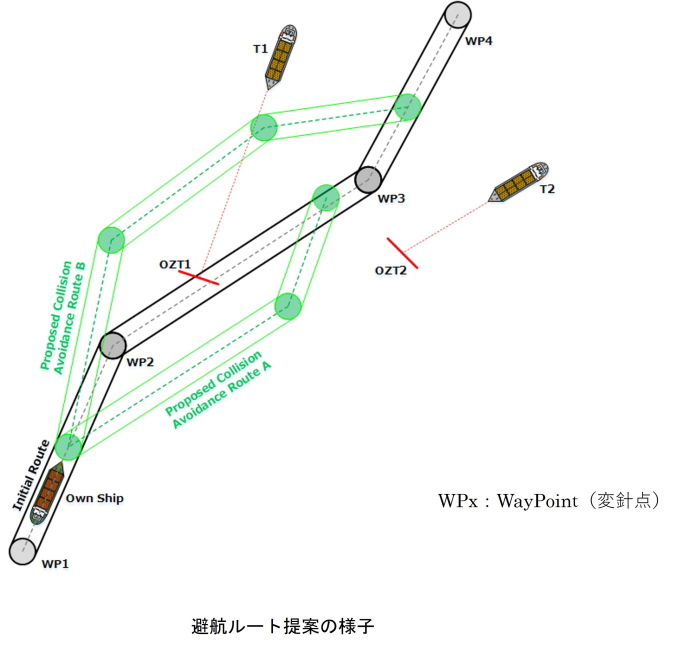
統合操船者支援システムは、監視航路上でOZT(注3)による他船との衝突危険が予測された場合、避航ルートを自動生成し、避航操船を支援するものです。避航ルートはCOLREGs(注4)を考慮し、1時間以内に元の航路に戻れる最大2つの避航ルートを提案します。また、選択した避航ルートに対して、Auto PilotやECDIS(注5)とシステム連携することで、Track Control(注6)を行います。
引き続き、当社は、既存RORO貨物船「第二ほくれん丸」で無人運航機能を実現するため、川崎汽船、日本無線および川崎近海汽船と共に、無人運航技術のコアとなる統合操船者支援システムを自動運航システムとして発展させてまいります。
(注1) AiPとは、Approval in Principle「基本設計承認」の略称であり、設計初期の段階の製品に対して、規則類の規定に基づく図面の審査を行い、規則類の観点での技術的な実現可能性を確認するスキームです。
出典:日本海事協会(ClassNK)
(注2) 無人運航船プロジェクトMEGURI2040「無人運航船の社会実装に向けた技術開発助成プログラム」
無人運航船の実用化を推進する技術開発を行うことで、本分野の技術開発への更なる機運を醸成し、その結果我が国の物流及び経済・社会基盤の変革を促進するべく、当該技術開発を支援する助成制度で、当社はDesigning the Future of Fully Autonomous Ships Plusコンソーシアム(DFFAS+)のメンバーとして参加しています。

(注3) OZT(Obstacle Zone by Target):相手船による航行妨害ゾーン
(注4) COLREGs :海上衝突予防法
(注5)Electronic Chart Display and Information Systemの略。電子海図情報表示装置
(注6) 航行制御
<関連リンク>
2023.11.27 日本財団の無人運航船プロジェクト RORO船で自動運航システムの海上実証実験を実施
2023.07.25 日本財団の無人運航船プロジェクト 社会実装に向けた第2ステージに参加
以 上