課題
-
危険が伴う洪水時の浮子観測の安全対策
-
観測作業員の後継者、担い手不足問題
-
浮子観測のピーク水位時のデータの取り逃がし
-
固定設置型の観測機器は土砂堆積、河床変動等にて欠損状態となった場合、復旧のための移設工事等が必要となる
-
昼夜、視界条件を問わず観測継続が必要
成果
導入前の背景と課題
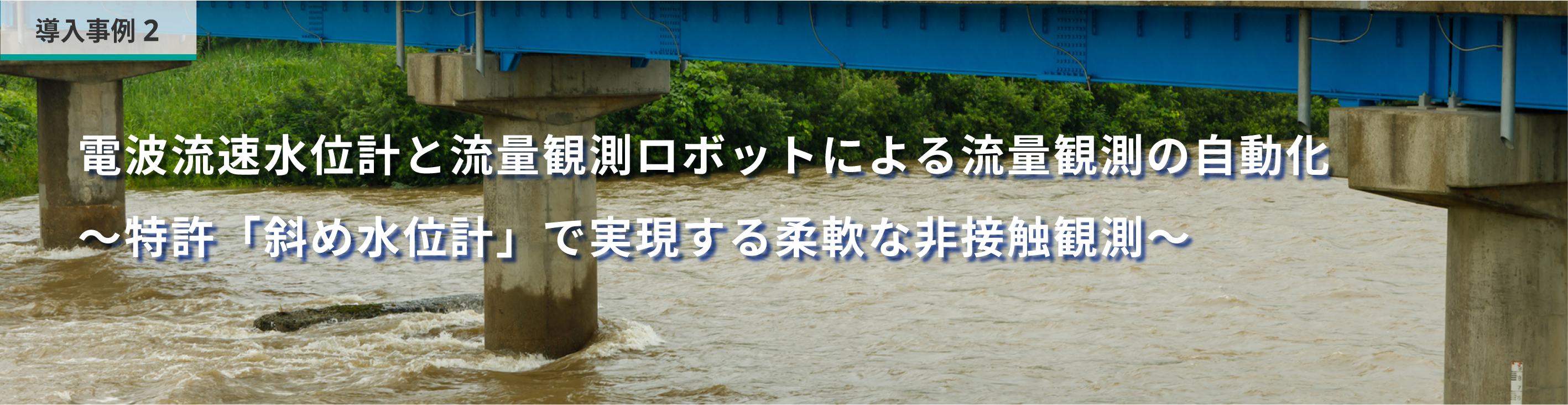
従来より流量観測では、観測員は洪水が発生している河川現場で浮子の投下を行い、その流下時間をストップウォッチで計測することで算定した流速と河川断面積を用いて流量を算出しています。この作業は危険を伴い、安全対策が必要でした。
また非接触式の水位計は流量観測の省人化、自動化の利点を活かして多くの河川で活躍しています。
しかし、それらは設置場所の真下の水面を計測する方式のため、澪筋変化や土砂堆積が発生する河川では欠測となってしまう場合がありました。
通常欠測状態からの復旧は水位計の移設工事や河道工事が必要となります。
導入のポイントまたは経緯
課題を解決するために国立研究開発法人土木研究所様との共同研究活動を通じて電波流速水位計を開発するなど、河川管理の課題解決に取り組んできました。
電波流速水位計は真下ではなく前方、斜めに電波を照射して河川の表面流速や水位を計測する方式を採用しています。
これにより、雲台の操作のみで観測位置を調整することができるため、澪筋変化や土砂堆積があった場合にも機器の移設や工事をすることなく、観測の継続が可能となりました。
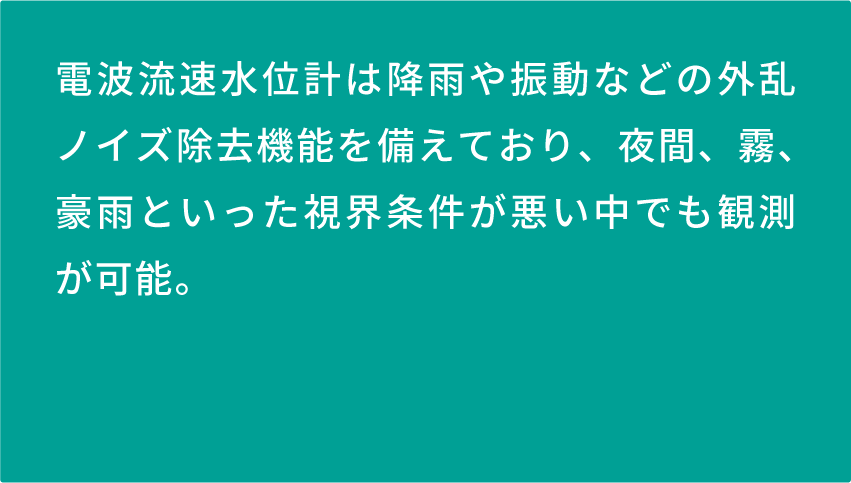
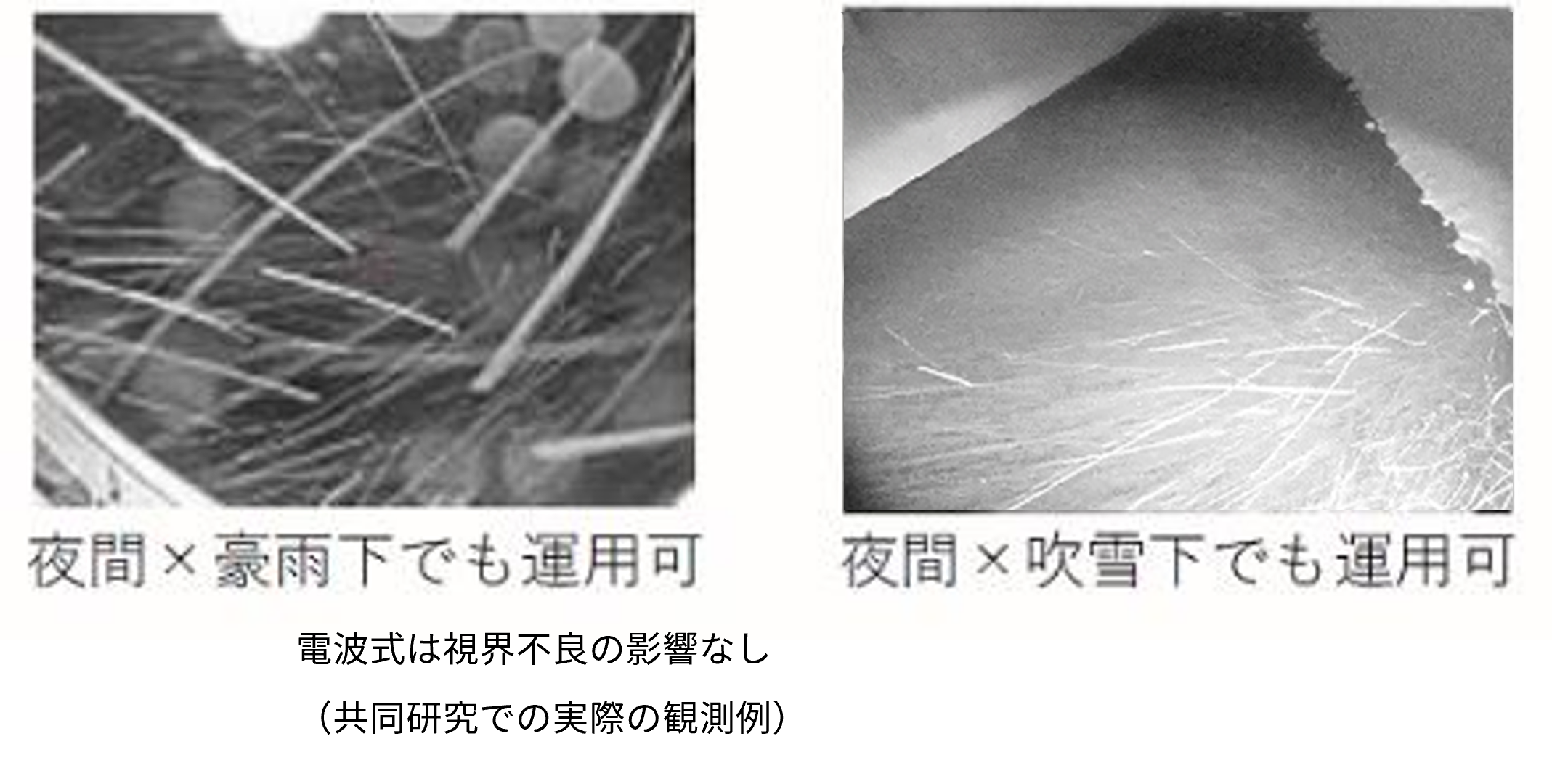
電波式であるため、観測には水面の波立ちが必要であるという制約はある一方で、夜間、豪雨、霧といった視界条件が悪い中でも観測が可能であるという強みがあります
システム概要
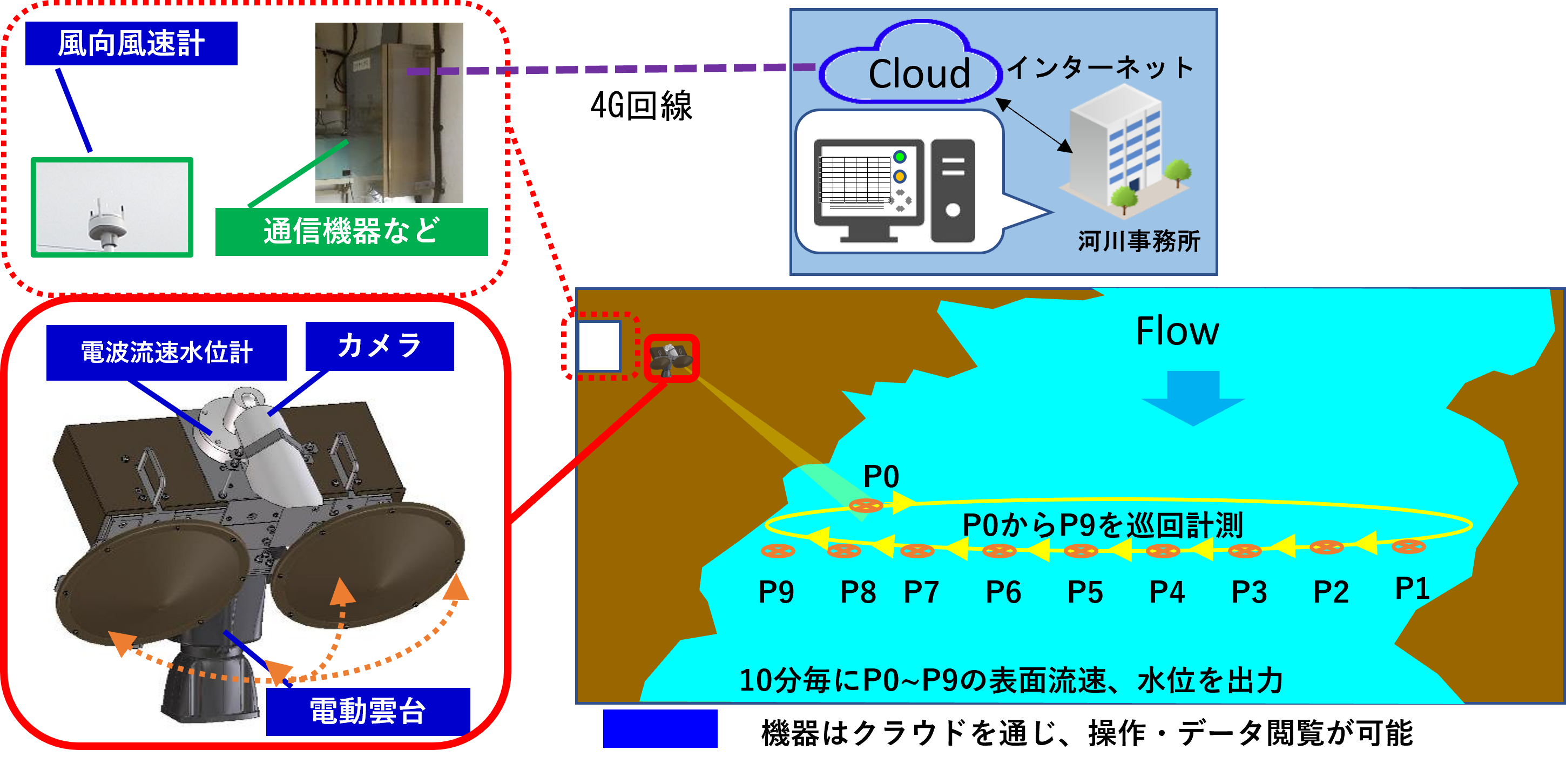
流量観測ロボットは、電波流速水位計をカメラとともに電動雲台に搭載し、インターネット回線により遠隔で操作できるシステムとなっています。
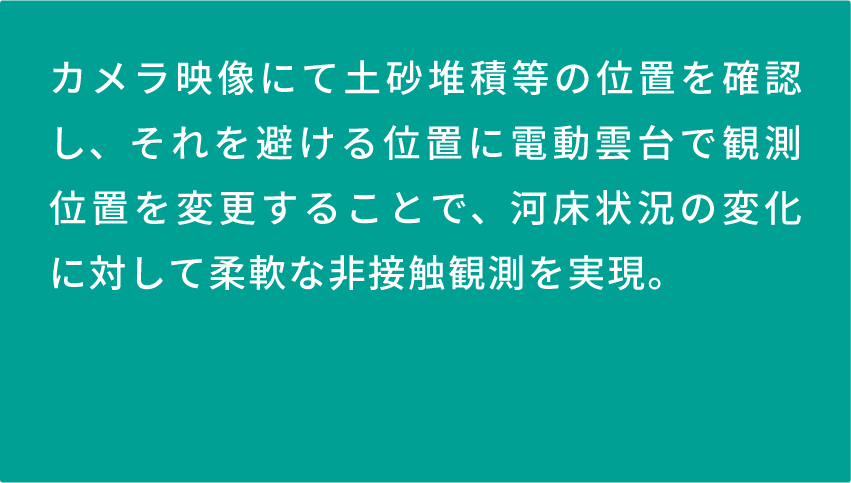
そのため、例えばリアルタイムにカメラ映像を閲覧し土砂堆積がある位置を確認し、それを避ける位置に電動雲台で観測位置を変更するといったことが可能となっており、柔軟な非接触観測を実現しています。
電動雲台の角度プリセットは複数登録でき、洪水時に河川の複数点(最大で10点)を巡回して観測することができます。
これにより、複数の測線に浮子を投下し流速を観測していた作業を電動雲台の首振りで自動、無人で対応することができるようになりました。
【電波流速水位計】
《2024年5月13日に国土交通省のNETIS(登録番号:KT-240030-A)に登録》
-
斜め照射によりこれまで困難だった場所にも設置可能
(例)設置構造物の真下が岩場や死水域である場所、霧が発生するなど画像式の適用が困難な場所 -
澪筋の変化にも対応。
水平方向(偏角)に左右45度 照射方向を変更することが可能なため、洪水で発生した河床状況の変化にも柔軟に対応します。
-
ノイズ除去機能により降雨や振動などの外乱ノイズを除去します。
-
電波法第38条の6第1項の規定に基づいた技術基準適合証明を取得しており、無線局免許の取得や無線従事者の資格が不要です。
【流量観測ロボット】
-
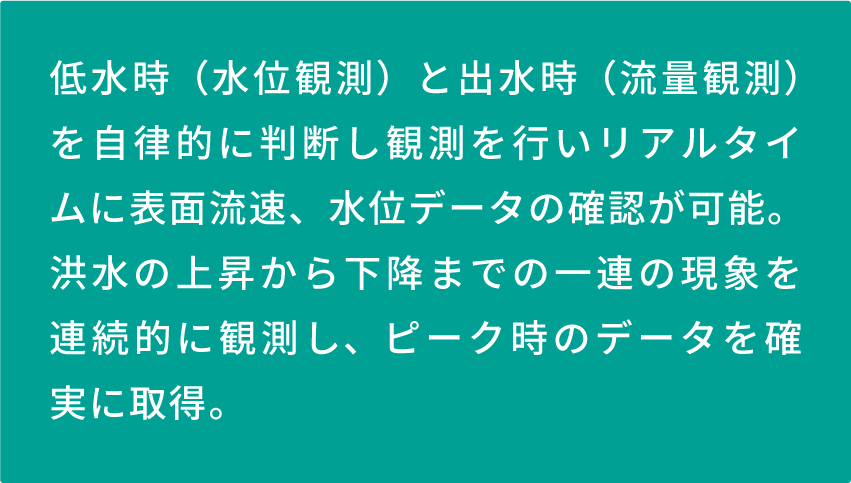
低水時(水位観測)と出水時(流量観測)を自律的に判断し観測を行います。
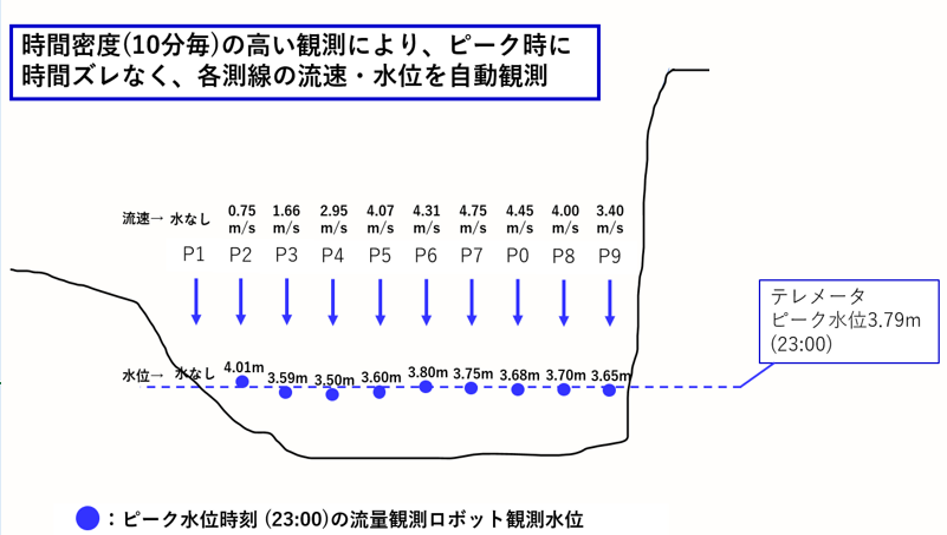
出水により水位が任意の値を超えた場合に流量観測モードに遷移し、代表観測点とあらかじめ設定した任意の観測点(最大9点)の表面流速・水位を計測します。
-
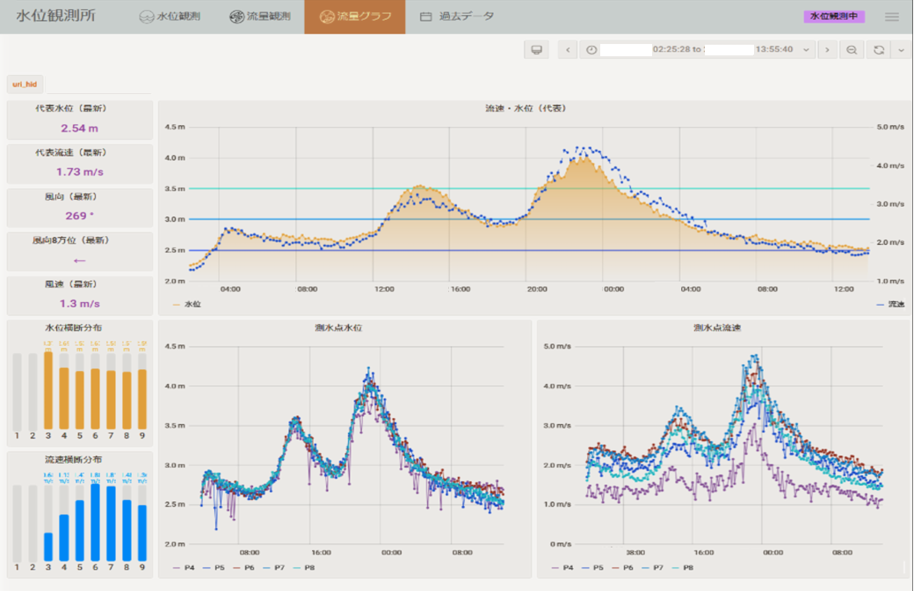
10分ごとの表面流速、水位、風向風速データがリアルタイムに閲覧可能、またデータのダウンロードが可能です(csv形式)。
※掲載の流量観測ロボットは固定型電波流速水位計WJ7701のカスタマイズ対応システムとしております。ご希望のお客様は弊社営業までご相談ください。
導入後の成果
流量観測ロボットの導入により観測員の安全確保と省人化によるコスト削減を実現しました。
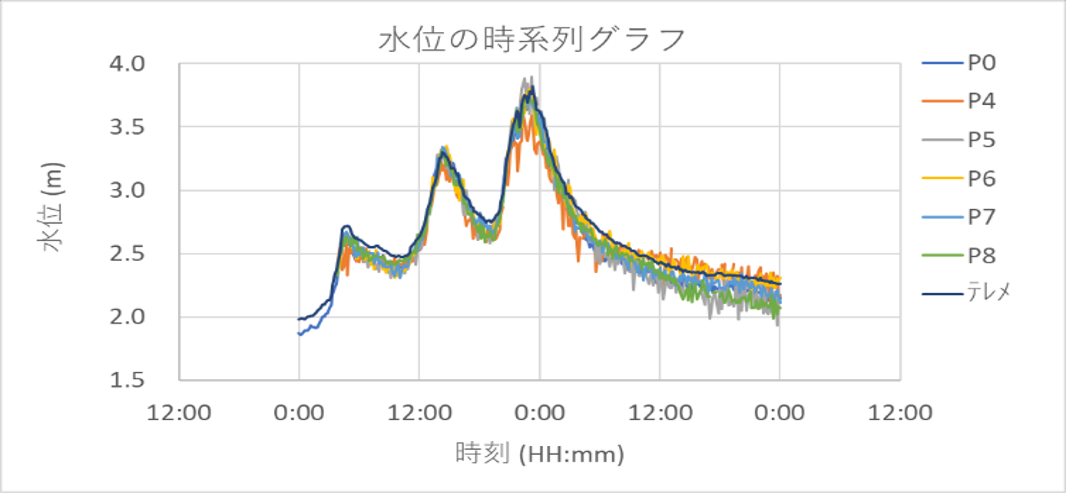
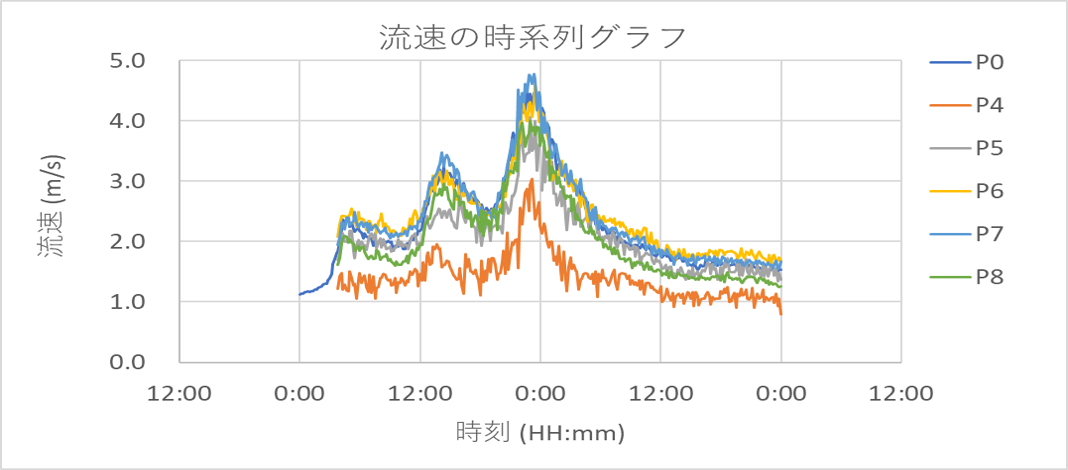
また計測された各測線の水位と水位観測局の水位を比較したグラフは、リアルタイムで流速と水位が出力され、洪水の上昇から下降までの一連の現象を連続的に観測し、ピークを捉えていることを示しています。
今後もより長距離での観測を目指した実証試験を行うなど、さらなる改善に取り組んで参ります。